Rear Wheel Steered Bike (RWSB) page
|
Rear Wheel Steered Bike (RWSB) page |
|
|
This site pretends to be a platform for everyone who is interested in rear wheel steered human powered vehicles. This is explicitly NO one way traffic: Everyone who can tell something interesting about this matter, is requested to tell me, so that I can place it on this site. |
Several times, people have tried to design and build a well functioning Rear Wheel Steered Bicycle (RWSB).
Some people start from the principle of trial and error; others work very systematically towards their goal.
Why should anyone want to have rear wheel steering, while there is a good way of front wheel steering?
There can be many arguments.
One motive to build an RWSB could be: It is exciting to build something that is until now so very unexplored.
It is a challenge to explore the unknown.
Other - more technical motivated - reasons could be:
|
That rear wheel steering indeed makes it possible to build very fast vehicles,
is proven by the first four wheeled land vehicle that successfully broke the sound barrier: The Thrust SSC (Super Sonic Car). This vehicle is propelled by two jet engines, whose fairings enclose the non-steering front wheels. The two steering rear wheels are placed in the rear of the fuselage. (I must remark that the maximum steering angle of this car is extremely small.)
But let's no more talk about motorized vehicles, and first restrict myself to two wheeled human powered vehicles.
|
The first one.
I have no idea what time the first serious attempt was made to build a working RWSB. In one of my bicycling books I found a sketch of some M.C. Donald dating from the year 1869. I don't know if this bike has really been built, and if yes, if it could be ridden.
I expect it could not.
In the same year, a patent was registered by a man called W.H. Laubach, who had invented a centre steered bicycle.
Because the saddle is connected to the front part, you might have called it a rear wheel steered bicycle.
Detail: Note the saddle pin suspension!
To this bike I have serious concerns about the practical usableness, too.
The first RWSB of which I know that it really can be ridden, is the ABT (dutch for RWSB) of Fred de Weert.
He writes about it in the dutch magazine HPV-nieuws 7-2 (july 1991).
His ABT had a negative steering-head angle and a long trail.
The steering mechanism had a bult-in reversal mechanism, so that moving the handlebars to the right meant
that the bike indeed turned to the right.:

Fred's publication was an inducement for me to contact him.
A short time later, I was allowed to borrow his RWSB, and to modificate it as much as I would like.
It appears to be possible to ride such a thing, but it is very unstable.
Steering requires much brute force, and while making a turn, it wants to steer stronger than you want it to do.
So strong counter-steering is necessary.
|
When you ride a two wheeled vehicle, you are in fact continuously trying to avoid falling.
The handlebars are non stop making small corrections. In other words: you can also say that you alternately make turns to the left and to the right. You never ride exactly straight on. You can also see it as a bike rides over a sandy path or over snow: The rear wheel will never exactly follow the line of the front wheel. Conclusion: We don't have to study riding straight on. We only have to look at cornering. During the steering, there are a lot of different forces acting on the steering wheel. It is important to know that.
Let's first look at the forces acting upon the steering system of a Front wheel steered bicycle (FWSB).
Take such an old fashioned city bike in mind, and imagine it's steering to the right:
|
|
Let's have a look at the steering mechanism of an imaginary bicycle with REAR WHEEL steering.
Because there is no standard design of such thing, I'll take the ABT of Fred de Weert.
On this bike, I'll discuss a corner to the right, as well. I discuss the differences with a FWSB. Differences are printed in red: 
|
Analysing how this RWSB could be improved, I thought as follows:
The biggest disadvantage of the ABT lies in the fact that the long trail pulls the center of gravity
so strongly to the wrong direction, while making a steering movement.
In order to avoid that effect, the steering head could better be placed behind the center of the rear wheel.
But then you create a negative trail, making the rear wheel unstable.
So the question is: Is it possible to move the center of gravity of the bike to the right side, without creating a negative trail?
That won't be possible with a single turning axis. But I considered that such could be possible with a complex movement.
With that in mind, I designed a completely different prototype. I called it ABT-2:

I would have thought that it should be a Columbus' egg, but after four months of intense trying and changing all parameters of the bike,
I couldn't ride a single meter on it!
Unfortunately, the movements of all parts are so complex that it is impossible to understand why this bike was unsuccessful.
I couldn't solve a couple of fundamental problems with my 'solution'. Disappointing but instructive.
Some time after I borrowed Fred de Weert's ABT, Jurriaan Bol borrowed it,
and he modificated it in many ways. He reported about it in HPV-nieuws 11-3 (May 1995).
It is an instructive article, because he analysed the steering system very systematically.
But, whatever he changed and altered on it, the results always proved disappointing.
(Click here for a summary of this article.)
A picture of one version of this altered ABT is shown here.
This is the version that I mentioned above: the one with the steering head behind the rear wheel.
There is someone else who has studied the rear wheel steered two wheeled bike extensively: dr. Craig J. Cornelius,
living in Woodinville, WA, USA.
In a 10 year's span, he has built 7 different prototypes, one of them has more or less the same mechanism as my ABT-2.
He reports comprehensively about his experiences in the magazine
'Human Power'
issue# 8/2, spring 1990 (page 6-7,17-20).
|
Of all these things it may be apparent that until now, it has not been succesful to build a well-usable RWSB. Also from the theoretical view-point, there are some reasons why this principle will inevitably keep having big disadvantages:
|

By the way, you can wonder if this bike can be really called a RWSB.
You can also consider it as a FWSB on which the rider is actually sitting on the handlebars.
In contrast to the Flevo, I expect this bike will not be rideable without using your hands.
I hope to find more information about this remarkable bike, soon.

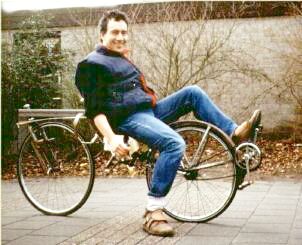
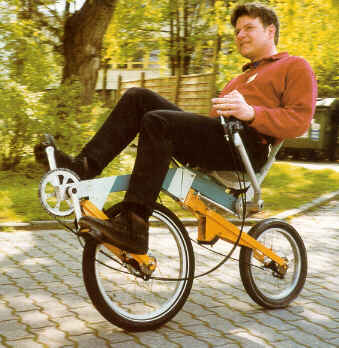
On the 2004 DaVinci art festival the Kinetic Sculpture artist Duane Flatmo was tooling around on this RWSB
quite well. Steering is done via steel cables.
Actually the position on this bike is so vertical that it doesn't take much to go forward over the front wheel, so it can be basically seen as an RWS unicycle.
This brings me to the thesis that rear wheel steering is easier if the riding position is more upright, and/or more towards the front wheel.
Thanks to Paul Hanrahan who sent me the picture and the story.
|
A number of other RWSB's has been made, and even more people take the challenge. In order to limit the size of this page, I put these projects on a separate page. Click HERE to visit them.
On several places on the globe, rear wheel steered trikes are built.
Because stability problems play a less dominant role in trikes, some of those trikes have even been in serial production.
|
This is what I can say about RWSB's. Not very encouraging.
In the meantime, I stopped my plans about RWSB's, and at this moment I'm designing and building other HPV's.
(as you can see on the other pages of this site.)
I want to advise you: If you want to start a rearwheel-steering adventure: Think good about what you're beginning.
And contact people who have built RWSB's before.
| If you want to contact me, look at my personal home-page. If you want to give comments or if you want to add something (pictures or experiences) to this page, I like to know! |
|---|
| Erik Wannee / last update: 2005-05-07 |
|