Велосипеды с задним рулевым колесом – ВЗРК.

|
Велосипеды с задним рулевым колесом – ВЗРК. |
|
| Я надеюсь, что эта статья явится отправной точкой для всех, кто собирается конструировать вело с задним рулевым колесом. |
Уже довольно давно люди предпринимают попытки сконструировать и построить велосипед с задним рулевым колесом (ВЗРК). Причем большинство из них следуют принципу проб и ошибок. Основными же доводами к постройке ВЗРК выступают следующие:
|
Схема с задним управляемым колесом позволяет строить очень быстрые транспортные средства, что подтверждено первым четырехколесным
автомобилем, который преодолел звуковой барьер: Thrust SSC (Super Sonic Car). Это сооружение приводится в движение двумя реактивными двигателями,
под которыми скрыты два передних (неуправляемых) колеса. Два управляемых колеса помещены в задней части фюзеляжа (должен заметить, что угол поворота
этих колес крайне мал).
Но здесь мы больше не будем упоминать о моторизованных транспортных средствах и поговорим о двухколесных вело.
|
Кто был первым?
Мне неизвестно когда впервые были предприняты серьезные попытки построить функциональный ВЗРК, но в одной из моих книг о велосипедах я нашел рисунок некоего
господина Дональда (M.C. Donald), датированный 1869 годом. Неизвестно, был ли этот велосипед реально построен и можно ли было на нем ездить. Я думаю, что нет.
В том же самом году был выдан патент господину Лаубаху (W.H. Laubach), который изобрел велосипед с «ломающейся» рамой. Так как сиденье закреплено на
передней части, можно сказать, что этот аппарат также относится к классу ВЗРК. Удивительно, но предусмотрена даже мягкая подвеска сиденья! Относительно
этого вело я также сомневаюсь по поводу способности к передвижению.
Первый известный мне ВЗРК, на котором можно было ездить, это ABT голландца Фреда де Вирта (Fred de Weert). Он описал его в голландском журнале «HPV-nieuws 7-2» (июль 1991 г.). Вело имел отрицательный наклон рулевой колонки и большой трэйл. Рулевой механизм имел устройство реверсирования, благодаря чему вело поворачивал в ту же сторону, куда велосипедист поворачивал руль.

Поняв на собственном опыте, что здесь что-то не то, я начал изучать теорию двухколесных транспортных средств.
|
Когда вы едете на двухколесном велосипеде вы фактически все время пытаетесь упасть. Руль постоянно совершает небольшие корректировки.
Другими словами: вы постоянно поворачиваете то влево, то вправо. Вы никогда не едете точно прямо. Особенно это заметно на песчаной или заснеженной поверхности:
след заднего колеса никогда не совпадает со следом переднего. Во время поворота на управляемое колесо действует комбинация различных сил.
Для начала уясним, какие силы действуют на обычный двухколесный велосипед. Представьте себе, что стандартный дорожный велосипед поворачивает направо:
|
Для внимательных: сказанное выше объясняет, почему рулевое управление велосипеда устроено так, а не иначе. Вот назначение основных геометрических параметров:
Трэйл (расстояние между мнимой точкой пересечения оси рулевой колонки с поверхностью земли и точкой касания колеса с поверхностью земли) – обеспечивает выравнивание колеса в направлении движения.
Смещение (расстояние между линией оси рулевой колонки и параллельной ей, проходящей через центр колеса) – обеспечивает стабилизацию угла поворота за счет массы системы велосипед-человек.
Угол наклона рулевой колонки – определен равновесием гироскопических моментов заднего и переднего колес в повороте.
А теперь взглянем на динамику прохождения поворота ВЗРК. Так как стандарта в этом классе велосипедов не существует,
возьмем для примера велосипед «ABT» Фреда де Вирта, и рассмотрим, что происходит при повороте направо. Различия в поведении велосипеда относительно
обычного отмечены красным цветом: 
|
Анализируя, как «ABT» может быть модернизирован, я думал следующим образом: основным недостатком «ABT» является то, что значительный трэйл при повороте смещает центр тяжести не в ту сторону. Для того чтобы избавиться от этого нежелательного эффекта, ось рулевой колонки должна проходить позади центра заднего колеса. Но таким образом мы создадим обратный трэйл, что сделает рулевое управление еще более нестабильным.
Возникает вопрос: как сделать возможным смещение центра тяжести на повороте в нужную сторону, но иметь при этом положительный трэйл?
Это невозможно имея одну ось поворота, но что если сконструировать сложную систему рулевого управления. С такими мыслями я разработал прототип, названный мною «ABT-2»:

Я решил, что теперь это должно работать, но после четырех месяцев упорных попыток подобрать приемлемые параметры геометрии рулевого управления я смог проехать лишь 1 метр на этой машине! К сожалению, движение различных частей рулевого механизма были настолько сложны, что понять, почему на этом велосипеде нельзя было ездить, оказалось невозможно. Своей модернизацией я не смог решить многих фундаментальных проблем, связанных с динамикой управления ВЗРК. Результат удручающий, но поучительный.
Следующим, кто попытался создать свой ВЗРК на основе «ABT» Фреда де Вирта был Джуриан Бол (Jurriaan Bol). Он создал множество разных модификаций этой конструкции, о чем сообщил в статье в журнале «HPV-nieuws 11-3» (май 1995 г.). Статья ценна тем, что Бол проанализировал систему управления очень подробно. Но с реальной машиной и его постигла неудача.
Фото справа: одна из модификаций, сделанных Болом. Линия оси рулевой колонки здесь проходит позади центра заднего колеса.
| Из всех знакомых мне машин типа ВЗРК по сей день нет ни одной, на которой можно было бы комфортно передвигаться. С практической точки зрения есть несколько причин, почему ВЗРК, даже если он способен (теоретически) к передвижению, будет неудобен в повседневной езде:
|
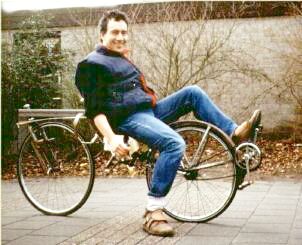
Для меня было большим сюрпризом обнаружить фотографию ВЗРК под названием Kalle
на одном немецком сайте. Судя по всему, человек на фотографии чувствует себя совсем неплохо, управляя этой машиной.

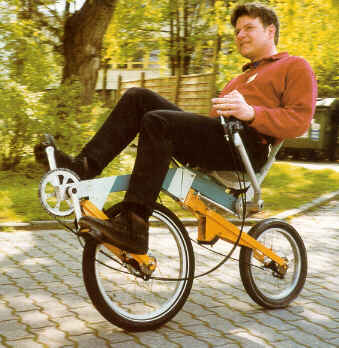
Дополнительная информация, взятая из журнала «Bike Culture Quarterly» (№ 11, стр. 52 и № 18, стр. 49) и присланная мне читателями моей странички указывает на то,
что велосипед изготавливается Гансом-Ульрихом Реймерсом (Hans-Ulrich Reimers) из г.Рейнкендорф
(Reinickendorf), неподалеку от Берлина, по заказу. Выглядит велосипед вполне практично. Изготовитель заявляет максимальную скорость в 40 км/ч.
Конструкция похожа на Флево-Байк (FlevoBike), но здесь сиденье закреплено на передней (поворотной) части машины. Из особенностей геометрии стоит отметить,
что угол наклона рулевой колонки положителен (как в обычных велосипедах), рулевая колонка находится далеко впереди относительно заднего колеса, а также,
что ось рулевой колонки пересекается с поверхностью земли спереди от точки касания передним колесом земли. С некоторой долей воображения можно сказать,
что и у переднего и у заднего колеса положительный трэйл.
By the way, you can wonder if this bike can be really called a RWSB. You can also consider it as a FWSB on which the rider is actually sitting on the handlebars.
In contrast to the Flevo, I expect this bike will not be rideable without using your hands. I hope to find more information about this remarkable bike, soon.
| За всю историю велосипеда было создано множество ВЗРК, и многие энтузиасты все еще продолжают попытки создать подобные машины.Кроме того, было построено много трехколесных веломобилей подобной конструкции, так как у них нет проблем с равновесием. Некоторые даже выпускаются серийно. |
Вот что я могу сказать о ВЗРК. Не очень утешительно. Я приостановил все свои планы по созданию ВЗРК и в настоящее время разрабатываю вело других типов. Если вы все еще хотите сконструировать ВЗРК, дам вам один совет: вперед!, но для начала поговорите с людьми, которые уже строили такие машины.
Подготовлено Den FoX
По материалам сайта www.wannee.nl
Оригинал статьи здесь